Projects
More projects to be posted soon! (Last updated: April 2025)
A Framework for Evaluating Human Driver Models using Neuroimaging
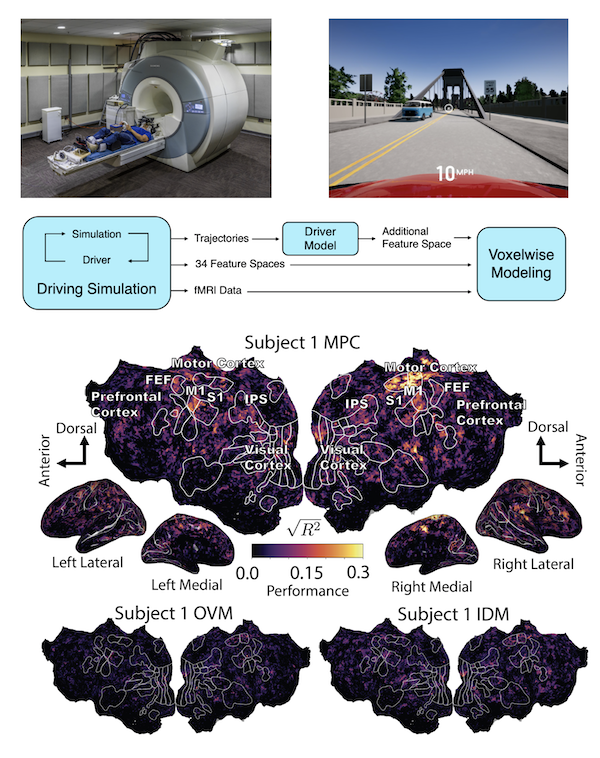 Driving is a
complex task which requires synthesizing multiple senses, safely reasoning about the behavior of
others, and adapting to a constantly changing environment. Failures of human driving models can
become failures of vehicle safety features or autonomous driving systems that rely on their
predictions. Although there has been a variety of work to model human drivers, it can be
challenging to determine to what extent they truly resemble the humans they attempt to mimic.
The development of improved human driver models can serve as a step towards better vehicle
safety. In order to better compare and develop driver models, we propose going beyond driving
behavior to examine how well these models reflect the cognitive activity of human drivers. In
particular, we compare features extracted from human driver models with brain activity as
measured by functional magnetic resonance imaging. We have explored this approach on three
traditional control-theoretic human driver models as well as on an end to end modular deep
learning based driver model. We hope to explore both how human driver models can inform our
understanding of brain activity and how better understanding brain activity can help us design
better human driver models.
Driving is a
complex task which requires synthesizing multiple senses, safely reasoning about the behavior of
others, and adapting to a constantly changing environment. Failures of human driving models can
become failures of vehicle safety features or autonomous driving systems that rely on their
predictions. Although there has been a variety of work to model human drivers, it can be
challenging to determine to what extent they truly resemble the humans they attempt to mimic.
The development of improved human driver models can serve as a step towards better vehicle
safety. In order to better compare and develop driver models, we propose going beyond driving
behavior to examine how well these models reflect the cognitive activity of human drivers. In
particular, we compare features extracted from human driver models with brain activity as
measured by functional magnetic resonance imaging. We have explored this approach on three
traditional control-theoretic human driver models as well as on an end to end modular deep
learning based driver model. We hope to explore both how human driver models can inform our
understanding of brain activity and how better understanding brain activity can help us design
better human driver models.
Point of contact: Christopher Strong, Kaylene Stocking
Read more here.
Certifiable Learning for High-Dimensional Reachability Analysis
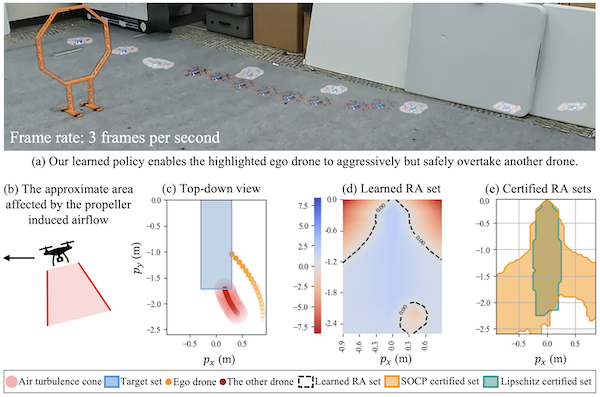 Ensuring the safe
operation of robotic systems in uncertain environments is critical for human-centered
autonomy—whether it’s humanoid robots working closely with people or air taxis navigating
crowded skies. Classical Hamilton-Jacobi reachability analysis provides rigorous safety
verification, but its curse of dimensionality makes it impractical for high-dimensional systems.
To overcome this, we leverage scalable deep reinforcement learning techniques to learn our newly
designed reachability value function, featuring properties such as Lipschitz continuity and
fast-reaching guarantees. Recognizing the black-box nature of most deep learning methods, we
enhance the credibility of our learned reachability sets by designing computationally efficient
post-learning certification methods. These real-time computable certification techniques deliver
deterministic safety guarantees under worst-case disturbances. Looking ahead, our two-stage
process (i.e., reachability learning followed by post-learning certification) sheds light on
designing next-generation reachability analysis tools that scale to complex, uncertain, and
high-dimensional safety-critical autonomous systems, with strong verifiable assurance.
Ensuring the safe
operation of robotic systems in uncertain environments is critical for human-centered
autonomy—whether it’s humanoid robots working closely with people or air taxis navigating
crowded skies. Classical Hamilton-Jacobi reachability analysis provides rigorous safety
verification, but its curse of dimensionality makes it impractical for high-dimensional systems.
To overcome this, we leverage scalable deep reinforcement learning techniques to learn our newly
designed reachability value function, featuring properties such as Lipschitz continuity and
fast-reaching guarantees. Recognizing the black-box nature of most deep learning methods, we
enhance the credibility of our learned reachability sets by designing computationally efficient
post-learning certification methods. These real-time computable certification techniques deliver
deterministic safety guarantees under worst-case disturbances. Looking ahead, our two-stage
process (i.e., reachability learning followed by post-learning certification) sheds light on
designing next-generation reachability analysis tools that scale to complex, uncertain, and
high-dimensional safety-critical autonomous systems, with strong verifiable assurance.
Point of contact: Jingqi Li
Read more here.
Hacking Predictors Mean Hacking Cars
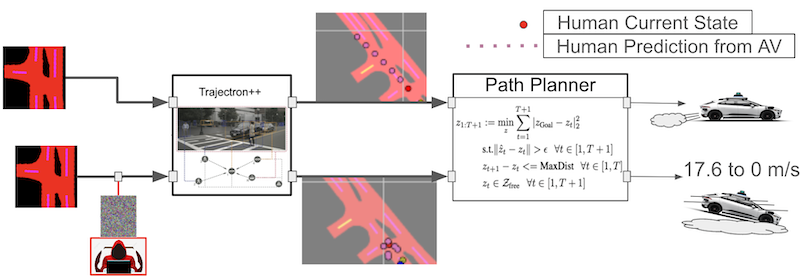 Adversarial
attacks on learning-based multi-modal trajectory predictors have already been demonstrated.
However, there are still open questions about the effects of perturbations on inputs other than
state histories, and how these attacks impact downstream planning and control. In this paper, we
conduct a sensitivity analysis on two trajectory prediction models, Trajectron++ and
AgentFormer. The analysis reveals that between all inputs, almost all of the perturbation
sensitivities for both models lie only within the most recent position and velocity states. We
additionally demonstrate that, despite dominant sensitivity on state history perturbations, an
undetectable image map perturbation made with the Fast Gradient Sign Method can induce large
prediction error increases in both models, revealing that these trajectory predictors are, in
fact, susceptible to image-based attacks. Using an optimization-based planner and example
perturbations crafted from sensitivity results, we show how these attacks can cause a vehicle to
come to a sudden stop from moderate driving speeds.
Adversarial
attacks on learning-based multi-modal trajectory predictors have already been demonstrated.
However, there are still open questions about the effects of perturbations on inputs other than
state histories, and how these attacks impact downstream planning and control. In this paper, we
conduct a sensitivity analysis on two trajectory prediction models, Trajectron++ and
AgentFormer. The analysis reveals that between all inputs, almost all of the perturbation
sensitivities for both models lie only within the most recent position and velocity states. We
additionally demonstrate that, despite dominant sensitivity on state history perturbations, an
undetectable image map perturbation made with the Fast Gradient Sign Method can induce large
prediction error increases in both models, revealing that these trajectory predictors are, in
fact, susceptible to image-based attacks. Using an optimization-based planner and example
perturbations crafted from sensitivity results, we show how these attacks can cause a vehicle to
come to a sudden stop from moderate driving speeds.
Point of contact: Marsalis Gibson
Competency-Aware Planning for Probabilistically Safe Navigation Under Perception Uncertainty
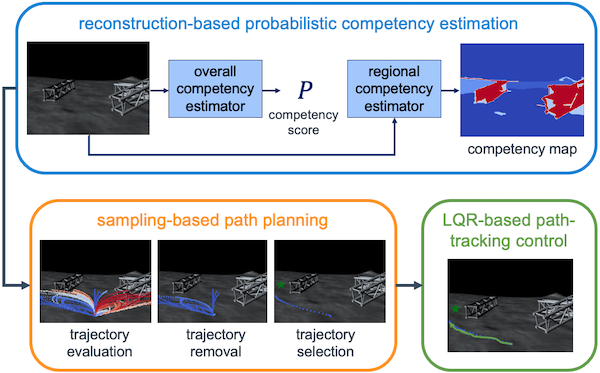 Perception-based
navigation systems are useful
for unmanned ground vehicle (UGV) navigation in complex
terrains, where traditional depth-based navigation schemes are
insufficient. However, these data-driven methods are highly
dependent on their training data and can fail in surprising
and dramatic ways with little warning. To ensure the safety of
the vehicle and the surrounding environment, it is imperative
that the navigation system is able to recognize the predictive
uncertainty of the perception model and respond safely and
effectively in the face of uncertainty. In an effort to enable
safe navigation under perception uncertainty, we develop a
probabilistic and reconstruction-based competency estimation
(PaRCE) method to estimate the model’s level of familiarity
with an input image as a whole and with specific regions
in the image. We find that the overall competency score
can accurately predict correctly classified, misclassified, and
out-of-distribution (OOD) samples. We also confirm that the
regional competency maps can accurately distinguish between
familiar and unfamiliar regions across images. We then use
this competency information to develop a planning and control
scheme that enables effective navigation while maintaining a
low probability of error. We find that the competency-aware
scheme greatly reduces the number of collisions with unfamiliar
obstacles, compared to a baseline controller with no competency
awareness. Furthermore, the regional competency information
is particularly valuable in enabling efficient navigation.
Perception-based
navigation systems are useful
for unmanned ground vehicle (UGV) navigation in complex
terrains, where traditional depth-based navigation schemes are
insufficient. However, these data-driven methods are highly
dependent on their training data and can fail in surprising
and dramatic ways with little warning. To ensure the safety of
the vehicle and the surrounding environment, it is imperative
that the navigation system is able to recognize the predictive
uncertainty of the perception model and respond safely and
effectively in the face of uncertainty. In an effort to enable
safe navigation under perception uncertainty, we develop a
probabilistic and reconstruction-based competency estimation
(PaRCE) method to estimate the model’s level of familiarity
with an input image as a whole and with specific regions
in the image. We find that the overall competency score
can accurately predict correctly classified, misclassified, and
out-of-distribution (OOD) samples. We also confirm that the
regional competency maps can accurately distinguish between
familiar and unfamiliar regions across images. We then use
this competency information to develop a planning and control
scheme that enables effective navigation while maintaining a
low probability of error. We find that the competency-aware
scheme greatly reduces the number of collisions with unfamiliar
obstacles, compared to a baseline controller with no competency
awareness. Furthermore, the regional competency information
is particularly valuable in enabling efficient navigation.
Point of contact: Sara Pohland
Read more here.
System-Level Analysis of Module Uncertainty Quantification in the Autonomy Pipeline
 Many autonomous
systems are designed as modularized pipelines with learned components. In order to assure the
safe operation of these systems, a common approach is to perform uncertainty quantification for
the learned modules and then use the uncertainty measures in the downstream modules. However,
uncertainty quantification is not well understood and the produced uncertainty measures can
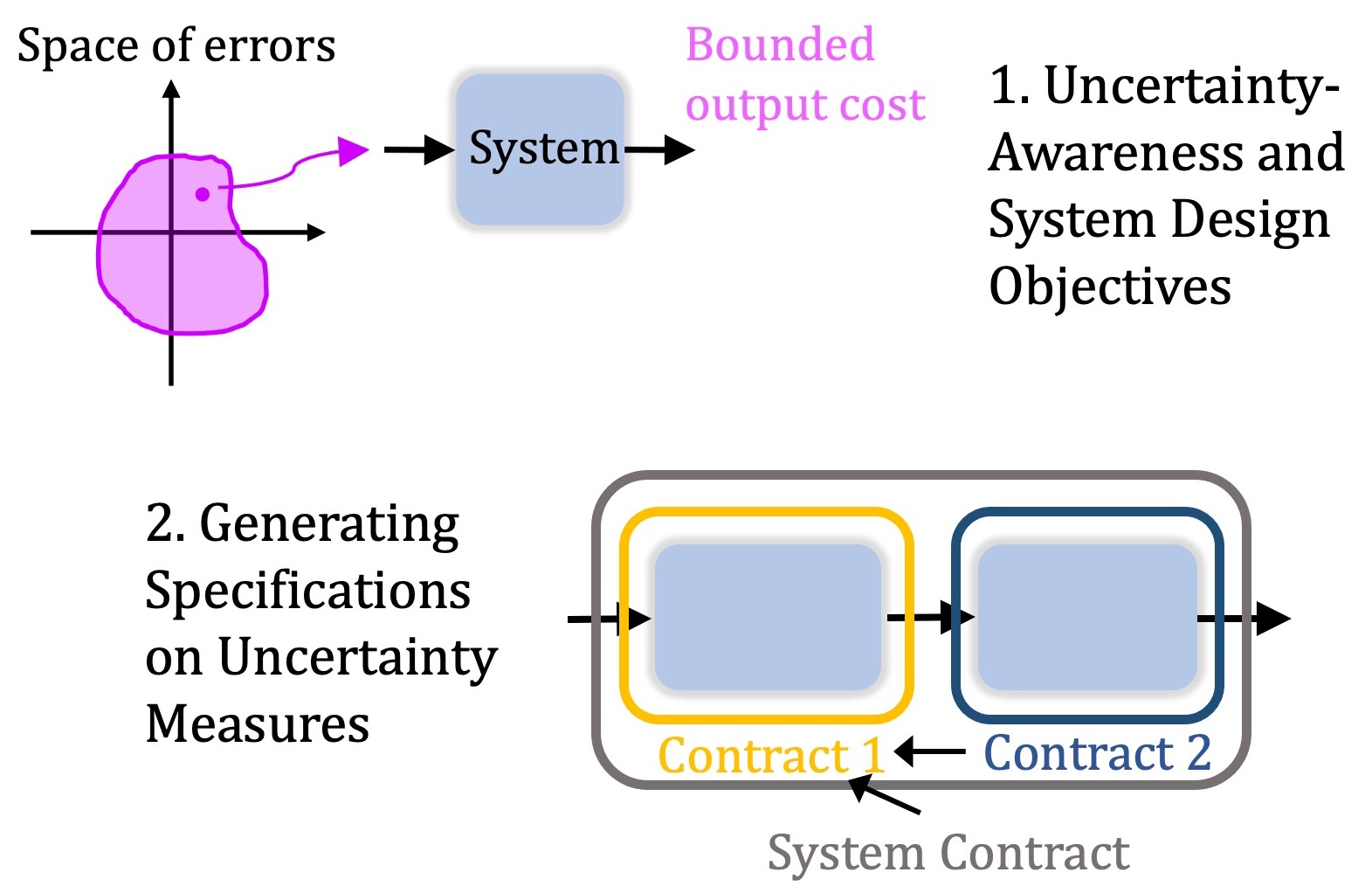
often be unintuitive. In this work, we contextualize uncertainty measures by viewing them from
the perspective of the overall system design and operation. We propose two analysis techniques
to do so. In our first analysis, we connect uncertainty quantification with system design
objectives by proposing a measure of system robustness and then using this metric to compare
different system designs. Using an autonomous driving system as our testbed, we use the new
metric to show how being uncertainty-aware can make a system more robust. In our second
analysis, we generate a specification on the uncertainty measure for a specific module given a
system specification. We analyze another real-world and complex system, a system for aircraft
runway incursion detection. We show how our formalism allows a designer to simultaneously
constrain the properties of the uncertainty measure and analyze the efficacy of the
decision-making-under-uncertainty algorithm used by the system.
Many autonomous
systems are designed as modularized pipelines with learned components. In order to assure the
safe operation of these systems, a common approach is to perform uncertainty quantification for
the learned modules and then use the uncertainty measures in the downstream modules. However,
uncertainty quantification is not well understood and the produced uncertainty measures can
often be unintuitive. In this work, we contextualize uncertainty measures by viewing them from
the perspective of the overall system design and operation. We propose two analysis techniques
to do so. In our first analysis, we connect uncertainty quantification with system design
objectives by proposing a measure of system robustness and then using this metric to compare
different system designs. Using an autonomous driving system as our testbed, we use the new
metric to show how being uncertainty-aware can make a system more robust. In our second
analysis, we generate a specification on the uncertainty measure for a specific module given a
system specification. We analyze another real-world and complex system, a system for aircraft
runway incursion detection. We show how our formalism allows a designer to simultaneously
constrain the properties of the uncertainty measure and analyze the efficacy of the
decision-making-under-uncertainty algorithm used by the system.
Point of contact: Sampada Deglurkar
Read more here.
Modeling and Control System Design of Modern Power Systems
Many autonomous Modern power systems can be characterized by their accelerated incorporation of renewable energy resources at the generation level, and electronics such as data centers and EVs at the load level. This represents a large shift in the way they behave, and how they need to be operated. Therefore, new engineering requirements are needed so that we can reliably operate the power grid in the face of change. Some of these needs include the modeling of new devices, their control, and studying how they fit into the existing grid. In our lab, we work on modeling power system components so that we can execute control, and perform stability analyses in order to provide recommendations as to how to operate the grid moving forward. Examples of our work include hybrid control of inverters, and high-fidelity modeling of transmission lines and loads.
Point of contact: Gabriel Enrique Colon-Reyes
Load Model-Independent Power System Regions of Attraction
 Power system load
modeling is difficult because it is impossible to know the details of all loads, let alone model
them from first principles. As a result, many approximate lumped load models have been developed
to attempt to capture the true behavior of the grid. These models have similar forms worldwide,
but there is no industry standard for which parameters are most accurate. As the particular
choice of parameters has a significant impact on the validity of simulation results,
particularly in transient simulations, we seek to find a set in state space which is within the
region of attraction of the operating point for a variety of different load model parameters.
Currently, we consider the ZIP family of load models, and hope to find a region of attraction
that functions for all linear combinations of Z (constant impedance), I (constant current) and P
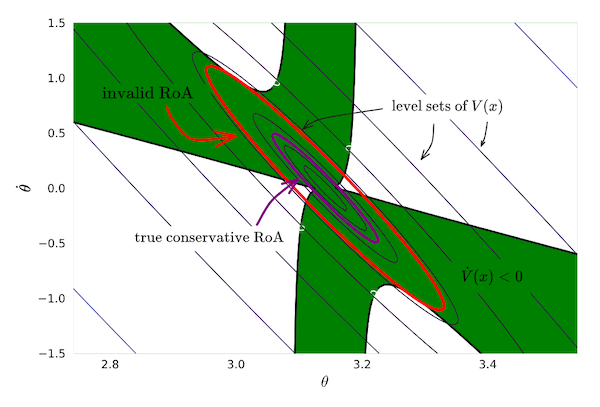
(constant power) loads. We develop an optimization-based method using quadratic Lyapunov
functions to compute this conservative region of attraction for the general case of ODE systems
on the order of 25 states.
Power system load
modeling is difficult because it is impossible to know the details of all loads, let alone model
them from first principles. As a result, many approximate lumped load models have been developed
to attempt to capture the true behavior of the grid. These models have similar forms worldwide,
but there is no industry standard for which parameters are most accurate. As the particular
choice of parameters has a significant impact on the validity of simulation results,
particularly in transient simulations, we seek to find a set in state space which is within the
region of attraction of the operating point for a variety of different load model parameters.
Currently, we consider the ZIP family of load models, and hope to find a region of attraction
that functions for all linear combinations of Z (constant impedance), I (constant current) and P
(constant power) loads. We develop an optimization-based method using quadratic Lyapunov
functions to compute this conservative region of attraction for the general case of ODE systems
on the order of 25 states.
Point of contact: Reid Dye
Control Barrier-Value Function: Unified Safety Certificate Function
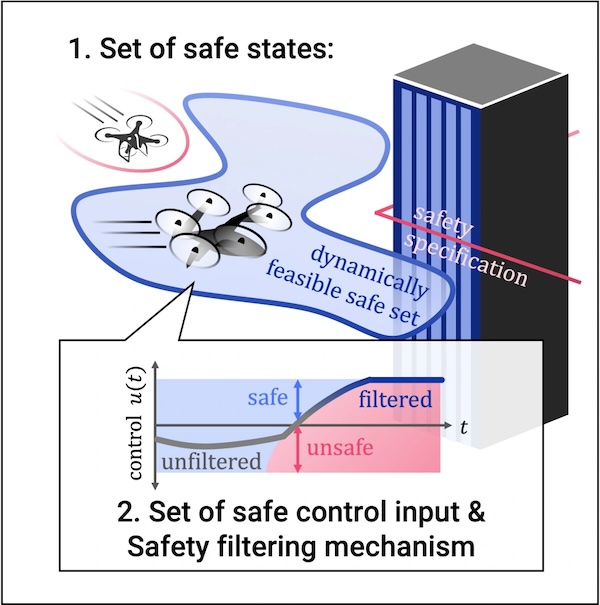 At the core of dynamical system safety assurance is verifying a 1) dynamically feasible safe set
where the system can indefinitely remain, and 2) designing a controller (or constraint on the
control input) to realize it. Many model-based approaches use the concept of a certificate
function, a scalar function whose level sets characterize the safe domain, and whose gradient
can impose a constraint on the control input to ensure safety. Control Barrier Functions (CBFs)
and Hamilton-Jacobi (HJ) reachability value functions are two prominent choices of the
certificate functions. CBFs’ key concept is to constrain the robot to "smoothly brake" before it
exits the safe domain. While this mechanism is easy to implement, constructing a valid CBF is
challenging. In contrast, HJ reachability constructs a maximal safe set that meets safety
specifications. However, the optimal control derived from its value function is often too
conservative for practical use.
A line of our research aims at bridging the gap between CBFs and HJ reachability, using the best
of both methods. We discovered that the CBF braking mechanism can be incorporated into the
reachability formulation, which makes it feasible to use its (set-valued) optimal policy as the
safety filter. Moreover, we discovered that all CBFs can be interpreted as reachability value
functions. An important accompanying finding is that in this interpretation, discount factors in
reachability play a crucial role, and they can help design machine learning-based approximate DP
algorithms like to have good convergence properties.
At the core of dynamical system safety assurance is verifying a 1) dynamically feasible safe set
where the system can indefinitely remain, and 2) designing a controller (or constraint on the
control input) to realize it. Many model-based approaches use the concept of a certificate
function, a scalar function whose level sets characterize the safe domain, and whose gradient
can impose a constraint on the control input to ensure safety. Control Barrier Functions (CBFs)
and Hamilton-Jacobi (HJ) reachability value functions are two prominent choices of the
certificate functions. CBFs’ key concept is to constrain the robot to "smoothly brake" before it
exits the safe domain. While this mechanism is easy to implement, constructing a valid CBF is
challenging. In contrast, HJ reachability constructs a maximal safe set that meets safety
specifications. However, the optimal control derived from its value function is often too
conservative for practical use.
A line of our research aims at bridging the gap between CBFs and HJ reachability, using the best
of both methods. We discovered that the CBF braking mechanism can be incorporated into the
reachability formulation, which makes it feasible to use its (set-valued) optimal policy as the
safety filter. Moreover, we discovered that all CBFs can be interpreted as reachability value
functions. An important accompanying finding is that in this interpretation, discount factors in
reachability play a crucial role, and they can help design machine learning-based approximate DP
algorithms like to have good convergence properties.
Point of contact: Jason J. Choi
Read more here.
Past Projects
Efficient Iterative Linear-Quadratic Approximations for Nonlinear Multi-Player General-Sum Differential Games
 Many problems in robotics
involve multiple decision making agents. To operate efficiently in such settings, robots must
reason about the impact of their decisions on the behavior of other agents. Differential games
offer an expressive theoretical framework for formulating these types of multi-agent problems.
Unfortunately, most numerical solution techniques scale poorly with state dimension and are
rarely used in real-time applications. For this reason, it is common to predict the future
decisions of other agents and solve the resulting decoupled, i.e., single-agent, optimal control
problem. This decoupling neglects the underlying interactive nature of the problem; however,
efficient solution techniques do exist for broad classes of optimal control problems. We take
inspiration from one such technique, the iterative linear-quadratic regulator (ILQR), which
solves repeated approxima-tions with linear dynamics and quadratic costs. Similarly, our
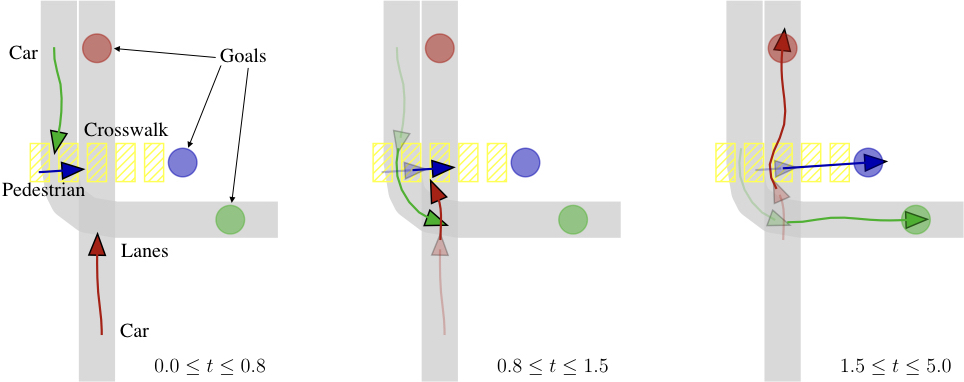
proposed algorithm solves repeated linear-quadratic games. We experimentally benchmark our
algorithm in several examples with a variety of initial conditions and show that the resulting
strategies exhibit complex interactive behavior. Our results indicate that our algorithm
converges reliably and runs in real-time. In a three-player, 14-state simulated intersection
problem, our algorithm initially converges in < 0.75 s. Receding horizon invocations converge in
< 50 ms in a hardware collision-avoidance test.
Many problems in robotics
involve multiple decision making agents. To operate efficiently in such settings, robots must
reason about the impact of their decisions on the behavior of other agents. Differential games
offer an expressive theoretical framework for formulating these types of multi-agent problems.
Unfortunately, most numerical solution techniques scale poorly with state dimension and are
rarely used in real-time applications. For this reason, it is common to predict the future
decisions of other agents and solve the resulting decoupled, i.e., single-agent, optimal control
problem. This decoupling neglects the underlying interactive nature of the problem; however,
efficient solution techniques do exist for broad classes of optimal control problems. We take
inspiration from one such technique, the iterative linear-quadratic regulator (ILQR), which
solves repeated approxima-tions with linear dynamics and quadratic costs. Similarly, our
proposed algorithm solves repeated linear-quadratic games. We experimentally benchmark our
algorithm in several examples with a variety of initial conditions and show that the resulting
strategies exhibit complex interactive behavior. Our results indicate that our algorithm
converges reliably and runs in real-time. In a three-player, 14-state simulated intersection
problem, our algorithm initially converges in < 0.75 s. Receding horizon invocations converge in
< 50 ms in a hardware collision-avoidance test.
Read more here.
Risk-Sensitive Safety Analysis
 An important
problem is to quantify how safe a dynamic system can be despite real-world uncertainties
and to synthesize control policies that ensure safe operation. Existing approaches
typically assume either a worst-case perspective (which can yield conservative
solutions) or a risk-neutral perspective (which neglects rare events). An improved
approach would seek a middle ground that allows practitioners to modify the assumed
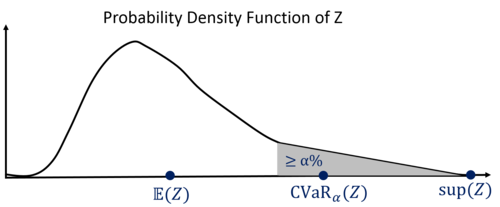
level of conservativeness as needed. To this end, we have developed a new risk-sensitive
approach to safety analysis that facilitates a tunable balance between the worst-case
and risk-neutral perspectives by leveraging the Conditional Value-at-Risk (CVaR)
measure. This work proposes risk-sensitive safety specifications for stochastic systems
that penalize one-sided tail risk of the cost incurred by the system’s state trajectory.
The theoretical contributions have been to prove that the safety specifications can be
under-approximated by the solution to a CVaR-Markov decision process, and to prove that
a value iteration algorithm solves the reduced problem and enables tractable
risk-sensitive policy synthesis for a class of linear systems. A key empirical
contribution has been to show that the approach can be applied to non-linear systems by
developing a realistic numerical example of an urban water system. The water system and
a thermostatically controlled load system have been used to compare the CVaR criterion
to the standard risk-sensitive criterion that penalizes mean-variance (exponential
disutility). Numerical experiments demonstrate that reducing the mean and variance is
not guaranteed to minimize the mean of the more harmful cost realizations. Fortunately,
however, the CVaR criterion ensures that this safety-critical tail risk will be
minimized, if the cost distribution is continuous.
An important
problem is to quantify how safe a dynamic system can be despite real-world uncertainties
and to synthesize control policies that ensure safe operation. Existing approaches
typically assume either a worst-case perspective (which can yield conservative
solutions) or a risk-neutral perspective (which neglects rare events). An improved
approach would seek a middle ground that allows practitioners to modify the assumed
level of conservativeness as needed. To this end, we have developed a new risk-sensitive
approach to safety analysis that facilitates a tunable balance between the worst-case
and risk-neutral perspectives by leveraging the Conditional Value-at-Risk (CVaR)
measure. This work proposes risk-sensitive safety specifications for stochastic systems
that penalize one-sided tail risk of the cost incurred by the system’s state trajectory.
The theoretical contributions have been to prove that the safety specifications can be
under-approximated by the solution to a CVaR-Markov decision process, and to prove that
a value iteration algorithm solves the reduced problem and enables tractable
risk-sensitive policy synthesis for a class of linear systems. A key empirical
contribution has been to show that the approach can be applied to non-linear systems by
developing a realistic numerical example of an urban water system. The water system and
a thermostatically controlled load system have been used to compare the CVaR criterion
to the standard risk-sensitive criterion that penalizes mean-variance (exponential
disutility). Numerical experiments demonstrate that reducing the mean and variance is
not guaranteed to minimize the mean of the more harmful cost realizations. Fortunately,
however, the CVaR criterion ensures that this safety-critical tail risk will be
minimized, if the cost distribution is continuous.
Read more here.
FaSTrack: a Modular Framework for Fast and Guaranteed Safe Motion Planning
 Fast and safe
navigation of dynamical systems
through a priori unknown cluttered environments is vital to many applications of
autonomous systems. However, trajectory planning for autonomous systems is
computationally intensive, often requiring simplified dynamics that sacrifice safety and
dynamic feasibility in order to plan efficiently. Conversely, safe trajectories can be
computed using more sophisticated dynamic models, but this is typically too slow to be
used for real-time planning. We propose a new algorithm FaSTrack:
Fast and Safe Tracking for High Dimensional systems. A path or trajectory planner using
simplified dynamics to plan quickly can be incorporated into the FaSTrack framework,
which provides a safety controller for the vehicle along with a guaranteed tracking
error bound. This bound captures all possible deviations due to high dimensional
dynamics and external disturbances. Note that FaSTrack is modular and can be used with
most current path or trajectory planners. We demonstrate this framework using a 10D
nonlinear quadrotor model tracking a 3D path obtained from an RRT planner.
Fast and safe
navigation of dynamical systems
through a priori unknown cluttered environments is vital to many applications of
autonomous systems. However, trajectory planning for autonomous systems is
computationally intensive, often requiring simplified dynamics that sacrifice safety and
dynamic feasibility in order to plan efficiently. Conversely, safe trajectories can be
computed using more sophisticated dynamic models, but this is typically too slow to be
used for real-time planning. We propose a new algorithm FaSTrack:
Fast and Safe Tracking for High Dimensional systems. A path or trajectory planner using
simplified dynamics to plan quickly can be incorporated into the FaSTrack framework,
which provides a safety controller for the vehicle along with a guaranteed tracking
error bound. This bound captures all possible deviations due to high dimensional
dynamics and external disturbances. Note that FaSTrack is modular and can be used with
most current path or trajectory planners. We demonstrate this framework using a 10D
nonlinear quadrotor model tracking a 3D path obtained from an RRT planner.
Read more here.
Probabilistically Safe Robot Planning with Confidence Based Human Predictions
 In order to safely
operate around humans, robots can employ predictive models of human motion.
Unfortunately, these models cannot capture the full complexity of human behavior and
necessarily introduce simplifying assumptions. As a result, predictions may degrade
whenever the observed human behavior departs from the assumed structure, which can have
negative implications for safety. In this paper, we observe that how "rational" human
actions appear under a particular model can be viewed as an indicator of that model's
ability to describe the human's current motion. By reasoning about this model confidence
in a real-time Bayesian framework, we show that the robot can very quickly modulate its
predictions to become more uncertain when the model performs poorly. Building on recent
work in provably-safe trajectory planning, we leverage these confidence-aware human
motion predictions to generate assured autonomous robot motion. Our new analysis
combines worst-case tracking error guarantees for the physical robot with probabilistic
time-varying human predictions, yielding a quantitative, probabilistic safety
certificate. We demonstrate our approach with a quadcopter navigating around a human.
In order to safely
operate around humans, robots can employ predictive models of human motion.
Unfortunately, these models cannot capture the full complexity of human behavior and
necessarily introduce simplifying assumptions. As a result, predictions may degrade
whenever the observed human behavior departs from the assumed structure, which can have
negative implications for safety. In this paper, we observe that how "rational" human
actions appear under a particular model can be viewed as an indicator of that model's
ability to describe the human's current motion. By reasoning about this model confidence
in a real-time Bayesian framework, we show that the robot can very quickly modulate its
predictions to become more uncertain when the model performs poorly. Building on recent
work in provably-safe trajectory planning, we leverage these confidence-aware human
motion predictions to generate assured autonomous robot motion. Our new analysis
combines worst-case tracking error guarantees for the physical robot with probabilistic
time-varying human predictions, yielding a quantitative, probabilistic safety
certificate. We demonstrate our approach with a quadcopter navigating around a human.
Read more here.